How to Achieve High-Precision Positioning Using RTK Technology?
In the current era where technological advancement, intelligentization, and digitalization are evolving at a rapid pace, positioning and navigation technologies have been deeply integrated into every aspect of production and daily life. This is particularly true in fields such as aviation, maritime navigation, surveying and mapping, unmanned aerial vehicles (UAVs), intelligent control, and autonomous driving—where the importance of high-precision positioning technology is self-evident.
How is spatial positioning of moving objects achieved? The principle is quite simple. Currently, major positioning technologies—such as satellite positioning (GPS, BeiDou, etc.), UWB positioning, and RFID positioning—can all be explained in plain language: essentially, they convert the transmission and reception time of wireless signals (which travel at the speed of light, c) into distance. Then, the spatial position of the moving object is determined using the distances to multiple known reference points. Due to differences in the wireless technologies they rely on, there is a general consensus regarding their applicable scenarios. Currently, the most common industry practice is to use satellite positioning for outdoor environments and UWB or RFID positioning for indoor environments.
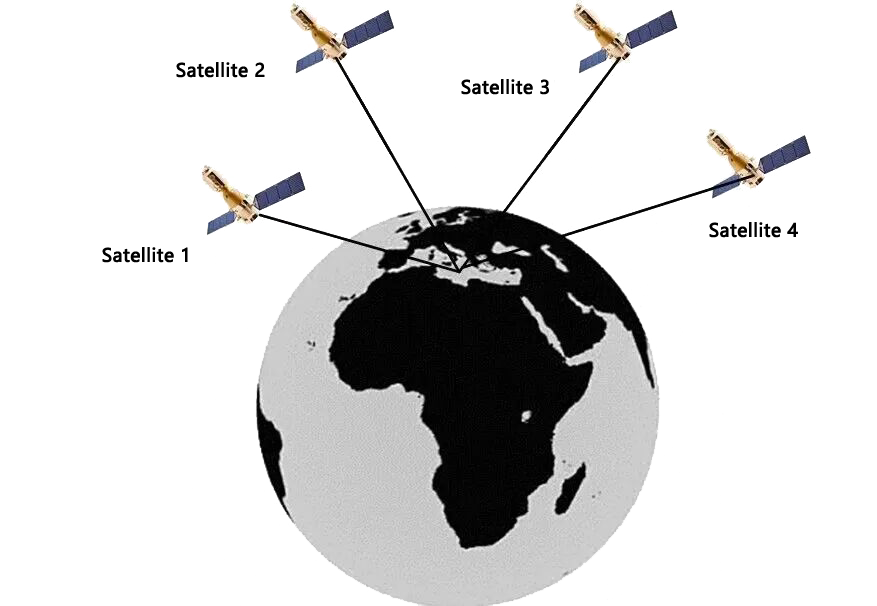
Satellite positioning refers to the use of communication between satellites and receivers to determine the receiver’s location. It enables the provision of accurate real-time position coordinates and relevant attribute characteristics to users on a global scale. To put it in simpler terms, it is a technology that uses satellites in space as reference points and signal sources, with terminals receiving signals to achieve spatial positioning. Leveraging satellites’ global coverage and all-weather operation capabilities, satellite positioning has become the core technology for outdoor positioning. Currently, the major systems with all-weather global positioning and navigation capabilities are primarily the United States’ GPS and China’s BeiDou.
However, due to factors such as the impact of the Earth’s ionosphere on wireless communication, high-speed satellite movement and orbital deviations, atmospheric delays, and receiver noise, the positioning accuracy of the traditional satellite positioning “single-point positioning mode” can usually only reach the meter level. This is insufficient to meet the needs of high-precision engineering and intelligent applications. Precisely because of the demand for high-precision positioning, the Real-Time Kinematic (RTK) technology—based on real-time dynamic carrier phase differential principles—has emerged, enabling satellite positioning accuracy to leap from the meter level to the centimeter level.
The core value of RTK lies in its combination of differential positioning principles and carrier phase observation technology, which can real-time eliminate or reduce systematic errors, thereby significantly improving the reliability and accuracy of dynamic positioning. This article will conduct an in-depth analysis of the implementation mechanism of RTK technology. Combining Guoxin Longxin’s years of project experience in the wireless industry, it will explain to industry users how RTK technology helps satellite positioning technology achieve centimeter-level high-precision positioning and provide assistance for users in the technical selection of positioning systems.
I. Why is the Accuracy of Traditional Satellite Positioning Not High?
In numerous operational scenarios such as port quay crane loading/unloading, mine truck transportation, and farm agricultural machinery operations, the accuracy limitations of traditional satellite positioning often lead to efficiency losses and safety risks. For instance, during container loading/unloading operations with port quay cranes, the spreader needs to be accurately aligned with the container lock holes. If the positioning error exceeds 10 centimeters, it may cause collisions between the spreader and the container; subsequent manual adjustments will also reduce operational efficiency. Unmanned mine trucks rely even more heavily on precise positioning—if the positioning error reaches the meter level, it may cause vehicles to deviate from the road, resulting in a series of serious operational accidents. In the field of modern smart agriculture, excessive deviations in the row spacing of seeds sown by agricultural machinery can lead to a 10%-15% waste of seeds per mu (a Chinese unit of area, approximately 0.067 hectares). Moreover, it will be impossible to accurately match the position of crops during subsequent irrigation and fertilization, significantly increasing the risk of yield reduction.

The root cause of significant errors in satellite positioning lies in the inability of traditional single-point positioning technology to avoid the following three core errors:
1. Dynamic Interference from Atmospheric Propagation Errors
Satellite signals must pass through the Earth’s atmosphere during transmission. The refraction effects of the ionosphere and troposphere are key factors limiting traditional positioning accuracy.
- Ionospheric delay: Caused primarily by charged particles (e.g., free electrons) interfering with signal propagation speed. During peak solar activity, this deviation can expand positioning errors to 1–3 meters.
- Tropospheric delay: Closely related to water vapor content, temperature gradients, and pressure changes. Particularly for low-elevation satellites (angle with the horizon < 15°), the signal path is longer, and delay errors can exceed 2 meters.
Traditional positioning can only perform rough corrections using preset atmospheric models, failing to adapt to real-time environmental changes. In atmospherically unstable regions such as high altitudes and coastal areas, such errors are further amplified, becoming a core challenge restricting accuracy.
2. Limitations in Satellite Signal Acquisition
The signal acquisition capability of traditional positioning devices is limited by hardware design and satellite system coverage:
- Most devices support only two satellite systems (GPS and BDS) and receive signals primarily in the L1 band (approximately 1575 MHz). In complex environments (e.g., building 遮挡,electromagnetic interference), the number of stably tracked satellites often drops below 6.
- Notably, positioning accuracy is positively correlated with the number of tracked satellites. When fewer than 5 satellites are available, positioning errors can surge to 5–10 meters.
- Additionally, factors such as phase center deviations of satellite signal transmitting antennas and multipath effects (interference from reflected/refracted signals caused by the receiver’s surrounding environment) further reduce positioning reliability.
3. Response Lag in Dynamic Scenarios
Traditional positioning devices typically have an observation update rate of only 1 Hz (updating position once per second) and a long hot start time (15–30 seconds). In dynamic scenarios (e.g., mine trucks traveling at 30 km/h):
- If a temporary signal loss occurs (interruption > 2 seconds), repositioning takes over 10 seconds. During this period, missing position data causes trajectory deviations, easily leading to collisions in narrow tunnels or intersections.
- This lag stems from the limited ability of receiver software and hardware to process errors, making it difficult to quickly converge and restore high-precision positioning.
These three flaws prevent traditional satellite positioning from meeting industrial-grade precision requirements. The emergence of RTK (Real-Time Kinematic) technology addresses these issues, enabling a leap from “meter-level” to “centimeter-level” accuracy.
II. Definition and Technical Principle of RTK Technology
RTK (Real-Time Kinematic) technology, fully known as “Real-Time Kinematic Carrier Phase Differential Technology,” is a high-precision positioning technology based on Global Navigation Satellite Systems (GNSS). By real-time processing and differential calculation of satellite signals, it breaks through the accuracy limitations of traditional satellite positioning, achieving a leap from meter-level to centimeter-level positioning. This provides critical technical support for industries requiring high-precision spatial location information.
In terms of technical attributes, RTK represents an advanced form of differential positioning technology. Compared to traditional pseudorange differential positioning, its core advantages lie in dual breakthroughs in real-time performance and high precision:
- It outputs results synchronously during positioning without the need for post-processing.
- It controls positioning errors within the centimeter range.
These features distinguish RTK from non-real-time high-precision positioning solutions, making it a preferred technology for high-precision positioning in dynamic scenarios.
1. Components of RTK Technology
RTK technology is not achievable with a single device but consists of three core components forming a complete system:
- Base Station
- Mobile Station
- Data Transmission Link
These components work collaboratively to form a closed loop, ensuring positioning accuracy and real-time performance.
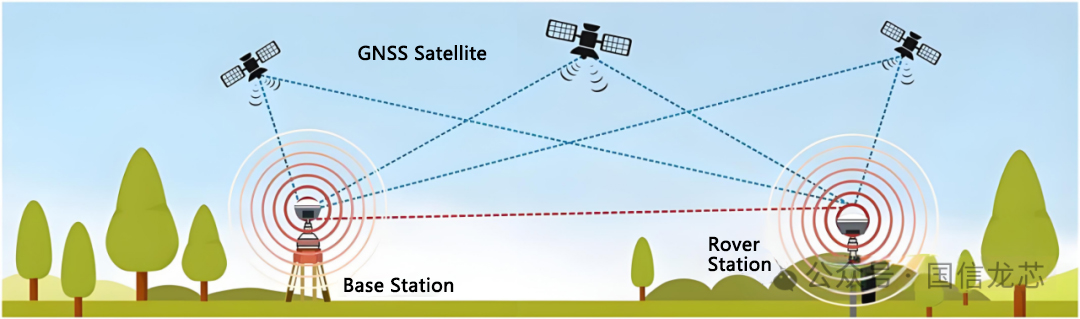
(1) Base Station (also known as “Ground Reference Station”)
The Base Station serves as the error calibration hub of the RTK system, with its core characteristic being a fixed location. In practical applications, it is typically installed at a precisely surveyed point with known coordinates. Equipped with a high-performance GNSS receiver, it continuously tracks positioning and navigation signals transmitted by satellites, while real-time monitoring various errors incurred during signal propagation (such as ionospheric delay, tropospheric delay, and satellite clock bias).
The hardware of a Base Station usually includes a high-stability GNSS antenna, a high-precision receiver, a data processing module, and power supply & communication equipment. Its software is responsible for decoding the received satellite signals, computing error correction parameters (including key data such as pseudorange corrections and carrier phase corrections), and transmitting these corrections to the Mobile Station in real-time via a data link.
(2) Mobile Station (also known as “Rover Station”)
The Mobile Station is the positioning execution terminal of the RTK system, primarily used to obtain high-precision positional information of target objects. It can be flexibly deployed according to application scenarios, such as being mounted on surveying instruments, UAVs, agricultural machinery, or autonomous vehicles. A common example of an RTK Mobile Station is Guoxin Longxin’s ICSE1000 series communication-sensing integrated system, which incorporates a BeiDou positioning module supporting RTK high-precision positioning.
Similarly equipped with a GNSS receiver and antenna, the core operation of the Mobile Station involves two steps: first, synchronously receiving satellite navigation signals to acquire raw positioning data; second, receiving error correction parameters from the Base Station via the data link and using built-in algorithms to perform real-time corrections on the raw data, ultimately outputting centimeter-level precise coordinates.
Compared to the Base Station, the design of the Mobile Station emphasizes portability or adaptability, requiring optimization of size, power consumption, and installation methods for different scenarios. However, its core capabilities in signal reception and data processing must match those of the Base Station.
(3) Data Transmission Link
The Data Transmission Link acts as the information bridge connecting the Base Station and the Mobile Station, and its stability directly determines the real-time performance and reliability of RTK positioning. Current mainstream transmission methods include radio communication, cellular networks (4G/5G), and Wireless Metropolitan Area Networks (WMAN). For intelligent and unmanned scenarios that demand higher reliability, security, and low latency, Guoxin Longxin prioritizes WMAN private networks as the transmission link. Alternatively, it can customize 4G/5G wide-area networks from telecom operators based on user requirements (with VPN virtual private networks available to enhance security).
An ideal RTK data transmission link must meet three core requirements: first, low latency to ensure timely delivery of error corrections to the Mobile Station, avoiding positioning deviations caused by data lag; second, high stability to reduce data packet loss due to obstacles, electromagnetic interference, etc.; third, wide coverage, especially in complex outdoor environments (such as mountainous areas or farmland), to guarantee effective signal transmission range.
Guoxin Longxin specializes in wireless services, with cases across China and globally, making it highly authoritative in data transmission technology. Government and enterprise clients implementing intelligent systems (e.g., unmanned vehicles, port logistics digital twins, intelligent remote control and autonomous driving of heavy machinery) inherently require reliable, secure, and stable WMAN private network support. RTK data occupies minimal bandwidth but demands high latency performance (Guoxin Longxin’s iMAX 5G WMAN private network can achieve latency below 3ms). Undoubtedly, “multi-network integration” is the optimal solution.
Guoxin Longxin’s iMAX 5G WMAN private network was once applied to the GPS high-precision data transmission network for the RTG system at a port in Saudi Arabia, earning high praise from users for its reliability, security, and stability.
2. Core Working Principles of RTK
The high-precision positioning capability of RTK technology essentially stems from the real-time differential correction of satellite signal errors. Its core workflow can be divided into the following four key steps:
- Synchronous Signal Reception:Both the Base Station and the Mobile Station simultaneously receive navigation signals from the same set of satellites. Since the Base Station’s coordinates are known, its receiver can accurately infer various errors during signal propagation by calculating the difference between the theoretical and actual satellite signal travel times. Meanwhile, the Mobile Station records raw positioning data containing these errors as it receives the satellite signals.
- Generation of Error Corrections:Based on its known coordinates and the received satellite signals, the Base Station computes error correction parameters for each satellite using specific algorithms. These corrections cover major error sources such as satellite clock bias, ionospheric delay, tropospheric delay, and receiver clock bias, serving as the core data for achieving high-precision positioning.
- Real-time Data Transmission:The Base Station continuously transmits the generated error corrections to the Mobile Station via the data transmission link. This step imposes high latency requirements on the link, typically necessitating millisecond-level latency control; otherwise, the corrections may become invalid due to dynamic changes in error conditions.
- Real-time Positioning Calculation:Upon receiving the raw satellite signals and the Base Station’s error corrections, the Mobile Station performs real-time calculations using carrier phase differential technology. Unlike traditional pseudorange differential techniques, RTK utilizes the carrier phase of satellite signals—with much shorter wavelengths (e.g., the GPS L1 carrier wavelength is approximately 19 centimeters)—as the measurement reference. This wavelength is far smaller than the unit precision of pseudorange measurements, enabling higher-precision distance determination.
The core RTK-related formulas are as follows:
■ Carrier Phase Observation Equation:
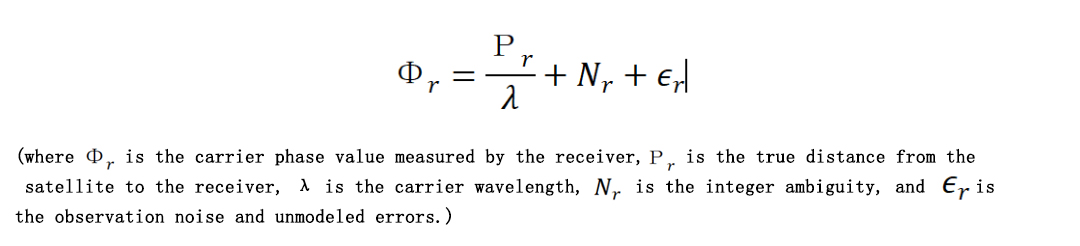
This equation describes how the raw observation value includes the true distance, integer ambiguity, and error term. In traditional positioning, the accumulation of observation noise and unmodeled errors can lead to meter-level errors. However, RTK specifically eliminates these errors through differential technology. Simply put, it measures distance using a finer “signal ruler” while clearly identifying all errors, preparing for subsequent corrections.
■ Single-Difference and Double-Difference Equations:
Single Difference (eliminates common errors between receivers):

In essence, the single-difference formula works by subtracting the signal measurements of the same satellite received by the mobile station and the base station. Its core function is to offset the inherent errors of the two devices. For example, if the receiver clocks of the mobile station and the base station are inaccurate (similar to two watches that do not keep time properly), such errors have a similar impact on both devices. When the measurements are subtracted, these errors cancel each other out, leaving only the true distance difference between the satellite and the two devices, along with minimal residual deviations. This eliminates the obstacle of device-specific inaccuracies for subsequent precise calculations.
Double Difference (further eliminating common errors between satellites):

The double-difference formula builds on the single difference by further subtracting the single-difference results of two satellites. Its core function is to eliminate satellite-specific errors (e.g., inaccurate satellite clocks or signal delays when passing through the atmosphere—similar to a school bell that keeps incorrect time, which affects all devices uniformly). Such errors introduce similar biases to the single-difference results of both satellites; by subtracting these results again, the biases are canceled out. Ultimately, only distance difference information with almost no interference remains, marking a critical step toward centimeter-level positioning accuracy.
3. Achievement of RTK Centimeter-Level High-Precision Positioning
Based on the above introduction to RTK technology’s components and principles, the key to achieving centimeter-level satellite positioning lies in addressing the three core limitations of traditional positioning—atmospheric errors, signal constraints, and dynamic lag—through three targeted technical approaches. The specific logic is as follows:
(1) Offset Atmospheric Propagation ErrorsTraditional positioning relies on preset atmospheric models and cannot real-time correct ionospheric (1–3 meters of error) and tropospheric (over 2 meters of error for low-elevation satellites) delays. RTK, however, achieves precise error offset through collaboration between the base station and mobile station:
- The base station is deployed at a point with known coordinates. By comparing the theoretical and actual propagation times of satellite signals, it calculates error corrections that include atmospheric delays.
- These corrections are then transmitted to the mobile station via a low-latency data link. Since the mobile station and base station are typically within several kilometers of each other, their atmospheric environments are similar. The mobile station can directly use the corrections to eliminate atmospheric errors from its own signals, achieving an offset rate of over 95% with only centimeter-level residual deviation. This fundamentally resolves the core error source of traditional positioning.
(2) Upgrade the Measurement Reference
Traditional GPS relies on pseudorange measurements for positioning: it calculates distance using the time taken for satellite signals to reach the receiver and uses ranging codes (e.g., C/A codes) for single-point positioning. However, the signal wavelength (approximately 29.3 meters) limits its accuracy.
RTK uses carrier phase measurements, leveraging phase information from carrier signals (with a wavelength of approximately 19 centimeters) and high-precision phase differencing to achieve centimeter-level positioning, significantly enhancing signal decoding capability. In terms of satellite acquisition, RTK breaks through limitations in two ways:
a. Multi-Frequency Signal Reception
Both the base station and mobile station use high-performance GNSS receivers that support multiple systems and frequency bands—including GPS, BDS (BeiDou), and Russia’s GLONASS. For example, the high-performance GNSS receiver module integrated in Guoxin Longxin’s communication-sensing integrated gateway can simultaneously receive multiple frequency bands from various positioning systems (e.g., GPS L1C, L1C/A, L2, L5; BDS B1I, B2I, B3I). This enables stable tracking of over 10 satellites, ensuring signal stability even in complex environments and avoiding errors caused by insufficient satellite coverage.
b. Carrier Phase Differencing
RTK uses satellite signal carriers as the measurement reference. For instance, if the wavelength error is 1 part per million (ppm) (e.g., the 1.575 GHz carrier has a wavelength of 19 cm, so a 1 ppm error equals 0.00197 cm), traditional pseudorange differencing may fail to fully correct carrier phase errors, leading to approximately 3 cm of positioning deviation. In contrast, RTK controls errors to the millimeter level (e.g., within 0.1 cm) through carrier phase differencing and ambiguity resolution. Additionally, by calculating the carrier phase difference between the base station and mobile station using single-difference and double-difference equations, satellite clock bias and receiver clock bias are automatically offset, limiting distance measurement errors to within 1 cm. This achieves an order-of-magnitude improvement in measurement accuracy in principle.
Note: For the mobile station to directly receive raw carrier phase data from the base station and real-time calculate coordinates using double-difference observation equations, it must simultaneously track at least 4 satellites. This meets the requirements of true RTK differential algorithms and enables centimeter-level high-precision positioning.
(3) Optimize Dynamic Response
Traditional positioning struggles with dynamic scenarios due to its low update rate (only 1 Hz) and slow recovery after signal loss (over 10 seconds). RTK addresses this through two optimizations:
a. Low-Latency Transmission and High-Frequency Updates for Real-Time Performance
- The data link latency is controlled between 10–50 milliseconds (Guoxin Longxin’s iMAX WMAN private network achieves a minimum latency of 3–5 milliseconds), ensuring error corrections are transmitted to the mobile station in a timely manner.
- The mobile station’s observation update rate reaches 10–50 Hz (i.e., updating position data 10 to 50 times per second). For example, in scenarios where mine trucks travel at 30 km/h, this enables real-time tracking of position changes and prevents trajectory deviations.
b. Fast Integer Ambiguity Resolution to Shorten Recovery Time
To address the challenge of unmeasurable integer cycles in carrier phase measurements, RTK uses the LAMBDA algorithm. Leveraging the short distance between the base station and mobile station to reduce calculation complexity, it locks onto integer ambiguities in just 1–2 seconds. Even if a temporary signal loss occurs (interruption > 2 seconds), the mobile station can quickly restore centimeter-level positioning, completely resolving the dynamic lag issue of traditional positioning.
In summary, RTK addresses the 1–10 meter comprehensive errors of traditional positioning through three core approaches—offsetting atmospheric errors, upgrading measurement references, and optimizing dynamic response. It ultimately achieves positioning accuracy of ±(1–3) cm in the horizontal plane and ±(2–5) cm in elevation, completing the leap from meter-level to centimeter-level precision. This provides core support for industrial-grade high-precision positioning needs in fields such as surveying and mapping, ports, mining, and autonomous driving.
4. Calculation of RTK Positioning Accuracy ErrorsThe implementation of high-precision positioning technology always requires a reliable hardware system as a carrier. Guoxin Longxin’s ICSE1000 series communication-sensing integrated system is a typical example of deep integration between RTK technology and multi-scenario requirements. This system integrates positioning modules based on multi-satellite systems (e.g., BeiDou, GPS) and, when combined with RTK ground base stations, achieves high-precision positioning of 0.8 cm + 1 ppm (horizontal) and 1.5 cm + 1 ppm (vertical). But how is the error of an actual system calculated?
First, ppm (parts per million) is a distance-related error unit, meaning “one part in a million.” In simple terms, it represents an additional error of 1 millimeter per kilometer, used to correct cumulative errors in long-distance positioning.
Taking the horizontal error of 0.8 cm + 1 ppm as an example:
- When the baseline length (distance between the base station and mobile station) is 5 km:Horizontal error = 0.8 cm + (1 mm/km × 5 km) = 1.3 cm
- When the base station is built within 1 km of the mobile station:Horizontal error = 0.8 cm + (1 mm/km × 1 km) = 0.9 cm
Similarly, the vertical error under the 1 km baseline condition is:Vertical error = 1.5 cm + (1 mm/km × 1 km) = 1.6 cm
It should be clarified that this accuracy indicator applies to ideal conditions (base station distance ≤ 10 km, no signal obstruction, use of dual-frequency receivers) and requires compliance with instrument calibration and operational specifications.
Clearly, when the positioning error is 1–2 cm, it meets the positioning needs of most outdoor mobile scenarios.
III. Conclusion
The essence of RTK technology lies in reconstructing the accuracy logic of satellite positioning by addressing the root causes of errors. It moves beyond the “meter-level positioning” limitations of traditional positioning—where errors from atmospheric delays, signal constraints, and dynamic lag are passively accepted—to proactively offset systematic errors through differential correction, upgrade measurement references via carrier phase, and adapt to dynamic scenarios with real-time calculations. Ultimately, it achieves centimeter-level precision.

RTK technology not only fills the gap in industrial-grade high-precision positioning but also serves as a core enabler for driving intelligent upgrades in fields such as surveying and mapping, ports, mining, agriculture, and unmanned equipment. It enables centimeter-level positioning of moving objects in numerous outdoor mobile scenarios, providing fundamental data support for intelligent control:
(1) Intelligent Crane Control Scenarios:Applied to cranes in ports, logistics yards, and similar settings, it provides raw positioning data for anti-collision systems and digital twin systems of yard cranes, quay cranes, etc., preventing collision damage. When integrated with intelligent control systems, it can also meet the precision requirement of controlling container loading/unloading errors within the centimeter range, offering data support for intelligent remote control or autonomous operation.
(2) Smart Agricultural Machinery Scenarios:It enables the seeding row spacing of agricultural machinery to accurately match crop requirements, reducing seed waste and improving the operational efficiency of agricultural equipment.
(3) Smart Mining Scenarios:It provides real-time data support for mine vehicle dispatching; it also enables real-time high-precision positioning and navigation of unmanned mine trucks and unmanned mining machinery in complex environments, serving as critical infrastructure for unmanned intelligent driving systems.
(4) Smart Logistics Scenarios:It delivers real-time high-precision positioning for AGVs (Automated Guided Vehicles), IGVs (Intelligent Guided Vehicles), RGVs (Rail-Guided Vehicles), and various other unmanned logistics vehicles, supporting unmanned intelligent driving within logistics parks.
(5) Other V2X (Vehicle-to-Everything) Scenarios:It provides real-time high-precision positioning for fire trucks, engineering vehicles, forklifts, and special operation vehicles, making unmanned intelligent driving feasible.
(6) Ship-to-Everything (S2X) Scenarios:It offers real-time high-precision positioning for ships, naval vessels, and unmanned boats, meeting the needs of ship dispatching and management.
(7) Aircraft Scenarios:It provides real-time high-precision positioning and navigation for low-altitude aircraft such as airships, hot-air balloons, helicopters, and UAVs (Unmanned Aerial Vehicles), satisfying the management requirements of low-altitude economy aircraft.
It is important to emphasize that Guoxin Longxin’s ICSE1000 series communication-sensing integrated system not only enables RTK high-precision positioning but also provides multiple networking methods (Wireless Metropolitan Area Network (WMAN) private networks, 4G/5G, and WiFi). Additionally, it is equipped with an attitude sensor to meet the needs of real-time collection of acceleration, angular velocity, and other parameters, providing hardware support for the R&D and customization of inertial navigation systems.

For host manufacturers and integrator partners, using the ICSE1000 series products launched by Guoxin Longxin eliminates the need for complex technical integration. They can quickly connect to management platforms via the free-provided API interfaces to realize integrated applications of “positioning + communication + sensing”. Whether it is mine truck dispatching in mining areas, intelligent control of quay cranes in ports, or the management of unmanned equipment and vehicles in parks, all can rely on the products’ characteristics of “high precision + high adaptability” to quickly implement high-precision positioning solutions. Moreover, the products support in-depth customization; for specific information, please refer to ICSE1000 Series Communication-Sensing Integrated System.
From technical principles to hardware practice, RTK technology is gradually lowering the application threshold of high-precision positioning through the combination of error control logic and scenario-specific hardware carriers. It is bringing centimeter-level positioning capabilities—once limited to professional surveying—into more industrial production and intelligent equipment scenarios, and has become a key driver for various industries to transform from “extensive operations” to precise intelligent control.
If you have demands for high-precision satellite positioning, especially in mobile scenarios, intelligent control scenarios, and unmanned driving scenarios, and are facing problems such as inaccurate positioning, difficult network access, and high network costs, Guoxin Longxin can provide you with one-stop solutions. Welcome to contact us! We will offer full-process support from demand analysis, solution design, project implementation to post-operation and maintenance.
Appendix 1: Introduction to the BeiDou Navigation Satellite System (BDS)
The BeiDou Navigation Satellite System (BDS, also known as COMPASS; “BeiDou” is the Pinyin transliteration) is a global satellite navigation system independently developed by China. It is also the third fully operational satellite navigation system following GPS and GLONASS. Along with the US GPS, Russia’s GLONASS, and the EU’s GALILEO, BDS is a recognized supplier by the United Nations Committee on Global Navigation Satellite Systems (ICG).
Developed in response to China’s national security and socio-economic development needs, BDS is an independently constructed and operated satellite navigation system. It serves as a crucial national space infrastructure that provides global users with all-weather, all-time, and high-precision positioning, navigation, and timing (PNT) services.
Composed of three segments—space segment, ground segment, and user segment—BDS can provide high-precision, reliable PNT services to various users worldwide on an all-weather and all-time basis, and is also equipped with short-message communication capabilities. After years of development, BDS has become an important new-type infrastructure that offers global users all-weather, all-time, and high-precision PNT services. Through 30 satellites, BDS provides free PNT services to global users, achieving a horizontal positioning accuracy of better than 9 meters, vertical positioning accuracy of better than 10 meters, speed measurement accuracy of better than 0.2 meters per second, and timing accuracy of better than 20 nanoseconds worldwide.
To date, 137 countries around the world have signed cooperation agreements with BDS. With the successful completion of its global network, the international application scope of BDS will continue to expand in the future.
1. Basic Composition
- Space Segment: Consists of a number of Geostationary Earth Orbit (GEO) satellites, Inclined Geosynchronous Orbit (IGSO) satellites, and Medium Earth Orbit (MEO) satellites.
- Ground Segment: Includes several ground stations such as a master control station, time synchronization/injection stations, and monitoring stations, as well as inter-satellite link operation and management facilities.
- User Segment: Comprises basic products (such as chips, modules, and antennas) compatible with BDS and other satellite navigation systems, as well as terminal equipment, application systems, and application services.
BDS and GPS feature distinct frequency band designs. BDS adopts three frequency bands (B1/B2/B3), while GPS mainly uses the L1, L2, and L5 bands. The three-frequency design enhances positioning accuracy and anti-interference capabilities.
■ BDS Frequency Bands- B1: 1561.02–1591.02 MHz (for civilian positioning)
- B2: 1176.45–1207.55 MHz (for civilian positioning)
- B3: 1268.52–1300.00 MHz (for military encrypted signals, used to eliminate ionospheric errors)
■ GPS Frequency Bands
- L1: 1575.42 MHz (for civilian positioning)
- L2: 1227.60 MHz (for military/high-precision positioning)
- L5: 1176.45 MHz (for civilian high-precision positioning, with better performance in urban environments)
Technical Differences: BDS’s three-frequency design (especially the B3 band) can more effectively eliminate ionospheric errors and improve positioning accuracy in complex environments (e.g., urban canyons). GPS’s L5 band has been gradually popularized in recent years, but the system still mainly relies on dual-frequency (L1+L2) operations overall.
3. Latest Developments
- In 2009, the construction of the BDS-3 system was launched; in 2020, the launch and networking of 30 satellites were completed, marking the full completion of the BDS-3 system. Inheriting both active and passive service technical systems of BeiDou, BDS-3 can provide global users with basic navigation (positioning, speed measurement, timing), global short-message communication, and international search and rescue services. Users in China and surrounding regions can also access regional short-message communication, satellite-based augmentation, and precise point positioning services.
- In May 2025, as a core supplier of global satellite navigation systems recognized by the United Nations, BDS has been fully integrated into the standard systems of 11 international organizations in fields such as civil aviation, maritime affairs, and mobile communications, and continues to expand its international “circle of friends”. More than 30 African countries, including Nigeria, Tunisia, and Senegal, have built BDS Continuously Operating Reference Stations (CORS).
With the development of BDS construction and service capabilities, related products have been widely applied in fields such as transportation, marine fisheries, hydrological monitoring, meteorological forecasting, surveying and mapping geographic information, forest fire prevention, communication time synchronization, power dispatching, disaster relief and mitigation, and emergency search and rescue. Gradually penetrating into all aspects of social production and people’s lives, BDS is injecting new vitality into global economic and social development.
订阅评论
登录
0 Comments
最旧
最新
最多投票