
Inertial navigation is an autonomous navigation technology based on Newtonian mechanics. Without relying on external signals, it can perceive motion states and calculate real-time navigation parameters such as position, velocity, and attitude only by means of the inertial measurement unit mounted on the carrier. The core components of this unit are gyroscopes and accelerometers. Gyroscopes sense the rotational angular velocity of the carrier around each axis and lock the reference direction, while accelerometers measure the linear acceleration of the carrier along the three-dimensional spatial axes. Through integration operations, data from both can be converted into position information, enabling fully autonomous and continuous navigation and positioning of the carrier.
The collaborative integration of inertial navigation and satellite positioning can compensate for the shortcomings of a single navigation technology. Inertial navigation requires no interaction with the outside world, and features strong resistance to electromagnetic interference and terrain occlusion; it can stably output navigation data in environments without satellite signals such as tunnels, mine roadways, and deep seas. Satellite positioning solves the problem of cumulative errors in pure inertial navigation by virtue of its advantages of wide-area coverage and high-precision reference, and can achieve centimeter-level positioning accuracy when combined with RTK technology. The integrated navigation scheme ensures uninterrupted navigation in signal-free environments and high-precision positioning in signal environments. It combines the autonomy and anti-interference capability of inertial navigation with the accuracy and stability of satellite positioning, adapting to the positioning requirements of various complex scenarios.
With the accelerated upgrading of industrial intelligence, scenarios such as intelligent manufacturing and unmanned operation put forward core demands for full-scenario coverage and high-precision continuous positioning for navigation technology, driving its development toward diversification, high precision, low cost and miniaturization, and also spawning market demand for integrated equipment with autonomous anti-interference and precise calibration functions. This paper provides a brief introduction to the principles and applications of inertial navigation technology.
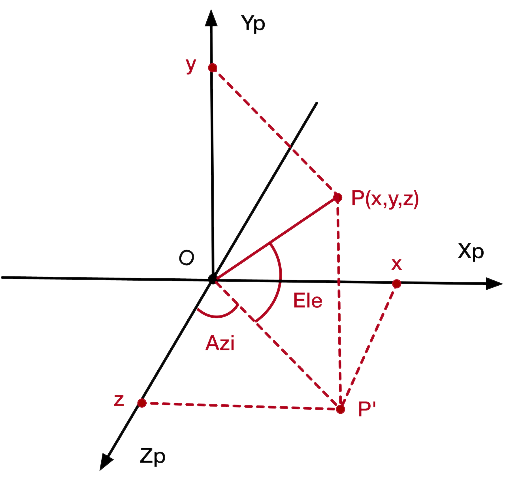
The inertial frame is an ideal reference frame that satisfies the law of inertia, such as the heliocentric inertial frame, which serves as the benchmark for dynamic equations. The navigation frame is a commonly used coordinate system in industry, mainly the East-North-Up (ENU) frame or the Earth-Centered Earth-Fixed (ECEF) frame. The WGS84 datum adopted by the Beidou System belongs to the ECEF frame, which is used to output final navigation parameters such as position and velocity. The body frame is rigidly attached to the carrier: the x-axis points along the forward direction, the y-axis points to the right side of the carrier, and the z-axis points vertically upward. All measurement data from the inertial measurement unit are collected based on this frame.
Transformation between various coordinate systems can be realized via direction cosine matrix or quaternion. Its core function is to convert the measured data (angular velocity, acceleration, etc.) collected in the body frame into physical quantities in the navigation frame, providing a unified benchmark for the calculation of inertial navigation.
2. Working Mechanism of Inertial Measurement Unit (IMU)
The inertial measurement unit is the core sensing component of inertial navigation. In industrial scenarios, the mainstream configuration is a six-axis IMU composed of a three-axis gyroscope and a three-axis accelerometer, which is also the default configuration for Guoxin Longxin-related products. Adding a three-axis magnetometer on the basis of a six-axis IMU upgrades it to a nine-axis IMU, which enhances heading calibration capability in complex magnetic environments and adapts to more demanding industrial scenarios.
The core function of the three-axis gyroscope is to measure the rotational angular velocity of the carrier around three axes and capture attitude changes in real time. All angular motion data such as pitch, roll and yaw can be accurately collected by the gyroscope. Even when the carrier experiences severe vibration or rapid turning in satellite-signal-free environments such as underground roadways and tunnels, the gyroscope can continuously lock the reference direction, laying a foundation for the autonomous operation of inertial navigation.
The core function of the three-axis accelerometer is to measure the linear acceleration of the carrier along three axes and capture its linear motion state. Acceleration data of all linear motions, including forward movement, braking, acceleration/deceleration, and vertical motion during uphill and downhill travel, can be collected by the accelerometer. Through integration operations, these acceleration data are first converted into real-time velocity of the carrier, and then into position change via secondary integration, completing the conversion from instantaneous motion data to continuous positioning information.
As a core extended component of the nine-axis IMU, the three-axis magnetometer accurately measures the magnetic azimuth of the carrier in three-dimensional space by sensing the direction and intensity of the geomagnetic field, thereby determining the geographic heading of the carrier. Its key role is to calibrate and correct the heading data of the gyroscope: the gyroscope is prone to small heading drift during long-term continuous operation, especially in complex industrial scenarios, which will degrade attitude sensing accuracy. The three-axis magnetometer can correct the heading deviation of the gyroscope in real time based on the geomagnetic field datum. Even in complex magnetic environments with electromagnetic interference such as mines and ports, it stably improves heading positioning accuracy, making the attitude sensing capability of the nine-axis IMU more suitable for strict industrial operation requirements.
In actual operation, the gyroscope, accelerometer and magnetometer (in nine-axis configuration) collect data synchronously, and the output frequency of each component is fully matched to ensure a unified time benchmark for attitude, position and heading data, providing complete and synchronized raw motion data for subsequent navigation calculation.
3. Core Algorithms of Inertial Navigation
The development of inertial navigation systems involves multiple coordinate systems and algorithms. A commonly used core formula of inertial navigation is the specific force equation (velocity update equation in the ECEF frame).
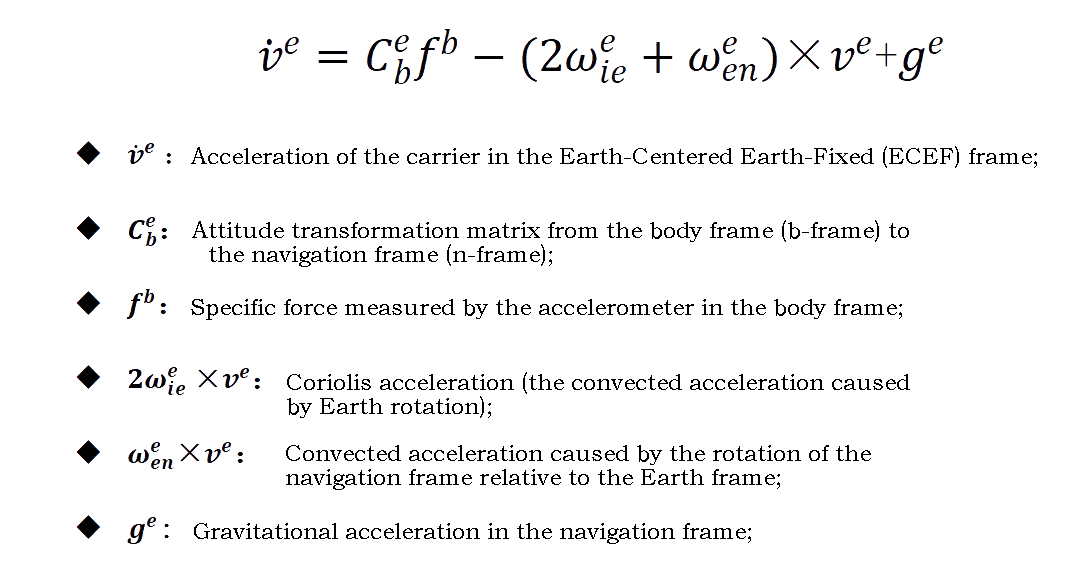
Based on the continuous calculation of raw measurements including attitude, velocity, and acceleration, combined with a full‑process error compensation mechanism, the cumulative error inherent in pure inertial navigation is resolved. Therefore, in software platform development, inertial navigation typically requires custom algorithm programming, which is divided into the following steps:
Step 1: Raw Data Preprocessing
The raw data collected by the inertial measurement unit is first filtered to remove noise caused by motor vibration and electromagnetic interference in industrial scenarios. Meanwhile, initial calibration is performed on the bias errors and scale factor errors of the gyroscope and accelerometer to improve the reliability of the raw data.
Step 2: Attitude Calculation
Based on the preprocessed gyroscope angular velocity data, the real‑time attitude of the carrier is updated using the quaternion method or direction cosine matrix method, accurately solving the pitch angle, roll angle, and heading angle of the carrier. Coordinate transformation from the body frame to the navigation frame is also completed to ensure that the acceleration data conforms to a unified calculation reference.
Step 3: Velocity and Position Calculation
After eliminating the effect of gravitational acceleration from the acceleration data transformed into the navigation frame, one integration is performed to obtain the real‑time velocity of the carrier. A second integration of the velocity data, combined with the initial positioning reference, finally yields the real‑time position information of the carrier, completing the full navigation parameter output.
Step 4: Dynamic Error Compensation and Fusion Calibration
The core issue of pure inertial navigation is that integration causes errors to accumulate continuously over time; the longer the carrier operates, the greater the positioning deviation. To address this problem, the mainstream industrial approach adopts a tightly coupled fusion algorithm of inertial navigation and satellite positioning. Using the absolute position and velocity references from satellite positioning, the cumulative errors of inertial navigation are dynamically corrected in real time. Meanwhile, algorithm optimization compensates for the random walk error of the gyroscope and the nonlinear error of the accelerometer, enabling long‑term maintenance of navigation accuracy even during temporary loss of satellite signals.
In the research and development of the integrated communication and sensing system, Guoxin Longxin provides free API development interfaces. Partners can perform data calculation and customize their own algorithms to meet inertial navigation requirements.
II. Application Scenarios of Integrated Inertial Navigation and Satellite Positioning Technology
Inertial navigation features full autonomy, strong anti-interference capability, continuous data output, and full-scenario adaptability. Initially applied in aerospace, national defense, and military industries, this technology has gradually expanded into various links of industrial production, becoming a key component of various unmanned and intelligent equipment. Combined with practical industrial applications, the core application scenarios of the integrated inertial navigation and satellite positioning technology are mainly categorized as follows:
1. National Defense, Military Industry and Aerospace
This is the earliest and most core application field of inertial navigation, with the most stringent requirements for navigation accuracy and reliability. High-precision inertial navigation systems are essential for flight attitude control and precise guidance of fighter jets and missiles, long-term underwater navigation of nuclear submarines in deep-sea signal-free environments, as well as orbit injection control and attitude stabilization of launch vehicles, artificial satellites, and space stations.
In various application scenarios of this field, external signals are highly vulnerable to interference, shielding, or even unavailability. The autonomous operation characteristic of inertial navigation, which does not rely on any external interaction, can meet the navigation demands of various equipment, serving as an important technical support for safeguarding national security and aerospace exploration.
2. Mining and Heavy Engineering Machinery
The operating environments of open-pit mines and underground mines are complex. Satellite positioning is completely unavailable in underground roadways, and slope occlusion in open-pit mines may cause occasional interruption of satellite signals. In addition, large-scale mining equipment generates strong electromagnetic interference, especially inside workshops with sky occlusion. Traditional satellite positioning technology cannot meet the continuous positioning and navigation demands of heavy mining machinery.
After being equipped with the integrated inertial navigation and satellite positioning system, heavy machinery such as mining trucks, excavators, and drilling rigs can achieve centimeter-level precise positioning in open areas with satellite signals. In signal-free environments, inertial navigation can continuously output stable position and attitude data, enabling unmanned driving of mining trucks, precise drilling of rigs, dynamic data collection for slope monitoring, and other operations, improving the safety and efficiency of mining operations. This is also one of the core application scenarios of Guoxin Longxin’s integrated communication and sensing system.
3. Port and Shipping
The intelligent control systems of mechanical equipment such as port shore bridges, gantry cranes, container trucks, and Automated Guided Vehicles (AGVs) often have extremely high requirements for positioning accuracy and operation continuity. Factors such as container occlusion and mutual shielding of large-scale equipment lead to unstable satellite positioning signals. The positioning system integrated with inertial navigation can provide continuous attitude and position data for scenarios such as precise container hoisting of port cranes and unmanned container truck driving. Even if satellite signals are temporarily lost, port operations can be ensured without interruption, guaranteeing the safety of the unmanned driving system.

In the shipping industry, positioning and navigation of ship routes, especially in ship-assisted driving and unmanned navigation scenarios, have high requirements for continuity and accuracy of positioning and navigation. The integration of satellite positioning and inertial navigation can reduce navigation risks caused by signal loss and improve the intelligent level of port operations and shipping.
4. Autonomous Driving and Intelligent Transportation
In scenarios such as passenger car autonomous driving and commercial vehicle assisted driving, satellite signals may be blocked or interrupted in urban canyons, tunnels, under viaducts, dense forest areas and other regions. Relying solely on satellite positioning technology may result in vehicle positioning failure and cause safety risks.
At present, the integrated solution combining inertial navigation, satellite positioning, and high-definition maps has become a standard configuration for high-level autonomous driving. When satellite signals are normal, satellite positioning can correct the cumulative errors of inertial navigation in real time. In areas where satellite signals are interrupted, such as tunnels and urban canyons, inertial navigation can continuously output the vehicle’s position, velocity, and attitude data, ensuring the continuous and stable operation of the autonomous driving system and improving driving safety.
In addition, the integrated technology of inertial navigation and satellite positioning is also widely used in scenarios including oil drilling, pipeline surveying and mapping, indoor personnel positioning for emergency rescue, and track inspection in rail transit. This integrated technology can be applied wherever satellite signals are limited and navigation autonomy is required.
III. Integrated Communication and Sensing System with Fused Inertial Navigation and Satellite Positioning
Relying on 20 years of technological accumulation in the wireless communication field and forward-looking layout in navigation and positioning systems, Guoxin Longxin has accurately captured the growing demand for collaboration among “network interconnection + precise positioning + real-time attitude sensing” in industrial scenarios.
In scenarios such as outdoor mobile operation of mining trucks and heavy trucks, warehouse handling of AGV/IGV, and precise port operation of shore bridges and gantry cranes, the traditional separate deployment mode of “communication equipment + positioning module + sensing terminal” not only has pain points such as poor equipment compatibility, data transmission delay and high comprehensive cost, but also struggles to meet scenario-based customized requirements.

To address these industry pain points, Guoxin Longxin has innovatively launched the ICSE1000 Series Integrated Communication and Sensing System and the RTKBS2000 Series High-Precision Positioning Base Station. These solutions deeply integrate an inertial navigation module (6-axis as default, upgradeable to 9-axis), multi-system satellite positioning (compatible with Beidou, GPS, GLONASS, etc.), multi-mode wireless communication (iMAX private wireless network, customized 4G/5G, WiFi), and attitude sensing functions into a modular integrated communication and sensing device. This perfectly meets the core industrial requirements of autonomous anti-interference + high-precision calibration.
Note: For the technical principle of RTK high-precision positioning, please refer to How to Achieve High-Precision Positioning Using RTK Technology?
This integration not only breaks down technical barriers between discrete devices and significantly reduces users’ overall costs in equipment procurement, installation, commissioning, and later operation and maintenance, but also achieves synchronous response of positioning data, attitude information, and communication transmission through deep hardware collaboration and algorithm optimization, ensuring uninterrupted navigation, zero data latency, and unbiased sensing.
Meanwhile, the products retain the core advantage of high customization. From adjusting the measurement accuracy and data output frequency of the inertial navigation module to integrating and adapting different network access modes, they can be precisely matched to the differentiated needs of various industrial scenarios such as mining, ports, warehousing, and emergency response. This truly provides industrial users with a one-stop solution, making the collaborative advantages of inertial navigation and satellite positioning more efficiently implemented and flexibly adapted, serving as robust technical support for promoting the intelligent upgrading of industry.
IV. Summary
With its irreplaceable autonomous navigation capability, inertial navigation has evolved from a core technology in national defense, military and aerospace fields into an indispensable part of the modern navigation system. The fusion technology of inertial navigation and satellite positioning not only solves the cumulative error problem of pure inertial navigation, but also compensates for the weak anti-interference ability of pure satellite positioning, making it an excellent navigation solution for industrial scenarios, transportation and high-end equipment fields.
In the future, with the continuous development of intelligent manufacturing, unmanned equipment, low-altitude economy and other fields, the application boundary of inertial navigation technology will be further expanded. Guoxin Longxin will continue to focus on core wireless technologies, help partners optimize the fusion algorithm of inertial navigation and satellite positioning, and develop products more suitable for industrial scenario requirements.