The ICSE1000 Series Integrated Communication and Sensing System, launched by Guoxin Longxin, is a highly customized comprehensive communication and sensing system that integrates a wireless private network (WMAN system), wireless public network (4G/5G, customization required), WiFi coverage, Beidou positioning and sensing, attitude sensing, video access (built-in, customization required), voice access, and GPIO control (customization required).
It features technical characteristics such as flexible networking methods, high satellite positioning accuracy, sensitive motion attitude sensing, and low power consumption. It can be applied in industries including railways, highways, ports, freight yards, industrial parks, warehouses, and industrial and mining enterprises. It meets the needs of networking, positioning, attitude monitoring, video surveillance, and other information sensing requirements in scenarios involving outdoor mobile vehicles (mining trucks, heavy trucks, cranes, freight trucks, cleaning vehicles, fire trucks, forklifts, warehouse cleaning machinery, etc.), heavy machinery (yard gantry cranes, quay cranes, overhead cranes, portal jib cranes, etc.), unmanned equipment (robots, AGV/IGV/RGV, etc.), and ships (especially unmanned ships).
The ICSE1000 Series Integrated Communication and Sensing System is a highly customized product. It is equipped with multiple networking interfaces (Ethernet interface, iMAX Wireless Metropolitan Area Network (WMAN) private network interface, and WiFi interface) as standard, enabling the convergence, hot backup, and routed networking of multiple networks. In particular, the iMAX WMAN private network can support the establishment of private networks for intelligent control scenarios that require higher stability, reliability, and security.
By default, the system integrates an IP network-based satellite positioning module and an attitude sensing module. The satellite positioning module can provide real-time Beidou satellite-based longitude, latitude, altitude, and clock information to the management and monitoring platform software. When combined with Real-Time Kinematic (RTK) positioning technology, it can achieve high-precision positioning. The attitude sensing module is a six-axis sensor by default (including a three-axis gyroscope and a three-axis accelerometer, and can be customized and upgraded to a nine-axis sensor). It provides real-time three-axis acceleration, three-axis angular velocity, and three-axis angle information to the management and monitoring platform software, enabling the sensing of the motion state and attitude changes of target objects—including but not limited to attitudes such as turning and pitching. This realizes real-time monitoring of object movement and serves as the foundation for AI unmanned driving algorithms.
The system supports the access of IP network camera modules. IP cameras are externally connected via network ports by default, enabling the access of multi-channel video surveillance. Additionally, customized integrated ultra-small pinhole cameras (up to 2 can be integrated for simultaneous front and rear monitoring) can be embedded inside the device body, facilitating rapid deployment.
The interfaces of the ICSE1000 Series Integrated Communication and Sensing System adopt aviation connector design, allowing adaptation to harsh industrial environments, with an operating temperature that complies with industrial wide-temperature standards. Free API development interfaces and related materials can be provided to third-party original equipment manufacturers (OEMs) or integrator partners. Moreover, due to the system’s inherent attribute of highly customized development, devices can be customized according to users’ actual needs to support the integration and access of more user-side sensors (such as millimeter-wave radars, temperature and humidity sensors, PM2.5 sensors, and hazardous gas detection sensors) as well as the convergence of different network access methods.
Technical Specifications
| Equipment Series |
ICSE1000 Series Integrated Communication and Sensing System |
|
Interface Specifications
|
| Power Supply Interface |
4-pin DC 12V Aviation Connector |
| Network Interface |
4 pcs of 8-pin M12 Aviation Connector, 10/100/1000 Mbps Auto-Negotiation |
| WMAN Interface |
Type-NM × 2 |
| WiFi Interface |
SMA Male Thread with Internal Pin × 2 |
| GNSS Interface |
SMA Male Thread with Internal Hole |
| Indicator Light |
System Power-On Indicator |
|
Specifications of Satellite Positioning Module
|
| Positioning Method |
China’s BDS (BeiDou Navigation Satellite System), the United States’ GPS (Global Positioning System), Russia’s GLONASS (Global Navigation Satellite System), the European Union’s GALILEO, Japan’s QZSS (Quasi-Zenith Satellite System), and Satellite-Based Augmentation Systems (SBAS), including WAAS (Wide Area Augmentation System), EGNOS (European Geostationary Navigation Overlay Service), GAGAN (GPS Aided GEO Augmented Navigation), and MSAS (MTSAT Satellite-Based Augmentation System). |
| Number of Channels |
It supports full-system and full-frequency-point reception, independent tracking of each satellite frequency point, and 60dB narrowband anti-jamming technology. |
| Signal |
BDS-2、BDS-3、GPS、GLO、GAL、QZSS、NavIC、SBAS |
| Frequency Point |
BDS-2:B1I/B2I/B3I
BDS-3:B1I、B1C、B2a、B2b、B3I
GPS:L1 C/A、L1C、L2、L5
GLONASS:G1、G2
Galielo:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6(CLAS)
NAVIC:L5
SBAS:L1 C/A |
| Positioning Error |
Single-point Positioning: Horizontal 1.5m, Vertical 2.5m;
RTK Positioning: Horizontal 0.8cm + 1ppm, Vertical 1.5cm + 1ppm |
| Loss-of-Lock Reacquisition Time |
≤1s |
| GNSS Protocol |
Compatible with the international standard NMEA 0183 protocol |
| Data Rate |
GNSS Observables: 10Hz, GNSS Positioning Frequency: 10Hz |
| Timing Accuracy (RMS) |
≤20ns |
| Speed Accuracy (RMS) |
0.03m/s |
| Time to First Fix (TTFF) |
Cold Start: 30s
Warm Start: 5s |
|
Specifications of Attitude Sensing Module
|
| Measurement Dimension |
Acceleration: 3 Dimensions
Angular Velocity: 3 Dimensions
Angle: 3 Dimensions |
| Data Output Content |
Module ID, Acceleration, Angular Velocity, Velocity, Quaternion |
| Output Frequency |
1Hz ~ 200Hz, 10Hz by default |
| Attitude Measurement Stability |
0.2° |
| Acceleration Range |
±16g, Angular Velocity: |
| Acceleration Resolution |
0.0005g/LSB (Condition: ±16g) |
| Acceleration Static Zero Drift |
±80mg (Condition: Horizontal Placement) |
| Acceleration RMS Noise |
0.75 to 1 mg-rms (Condition: Bandwidth = 100Hz) |
| Gyroscope Range |
±2000°/s |
| Gyroscope Resolution |
0.061 (°/s)/(LSB) (Condition: ±2000°/s) |
| Gyroscope Static Zero Drift |
±0.5 to 1 °/s (Condition: Horizontal Placement) |
| Gyroscope RMS Noise |
0.05 °/s-rms (Condition: Bandwidth = 100Hz) |
| Pitch and Roll Angle Range |
X±180°,Y±90° |
| Pitch and Roll Angle Resolution |
0.0055° (Condition: Horizontal Placement) |
| Pitch and Roll Angle Accuracy |
0.2° |
| Heading Angle Range |
Z:±180° |
| Heading Angle Resolution |
0.0055° (Condition: Horizontal Placement) |
| Heading Angle Accuracy: |
0.5° (Integral cumulative error exists in dynamic state) (Condition: 6-axis algorithm, static state) |
|
Physical Characteristics
|
| Dimensions |
250×160×100mm |
| Weight |
1350g |
| Power Consumption |
15W |
| Operating Temperature |
-40°C ~ 70°C |
| Operating Humidity |
95% relative humidity, non-condensing |
| Protection Level |
IP67 |
Decoding and Display of Data
1.The original data format of Beidou positioning and sensing is as follows:
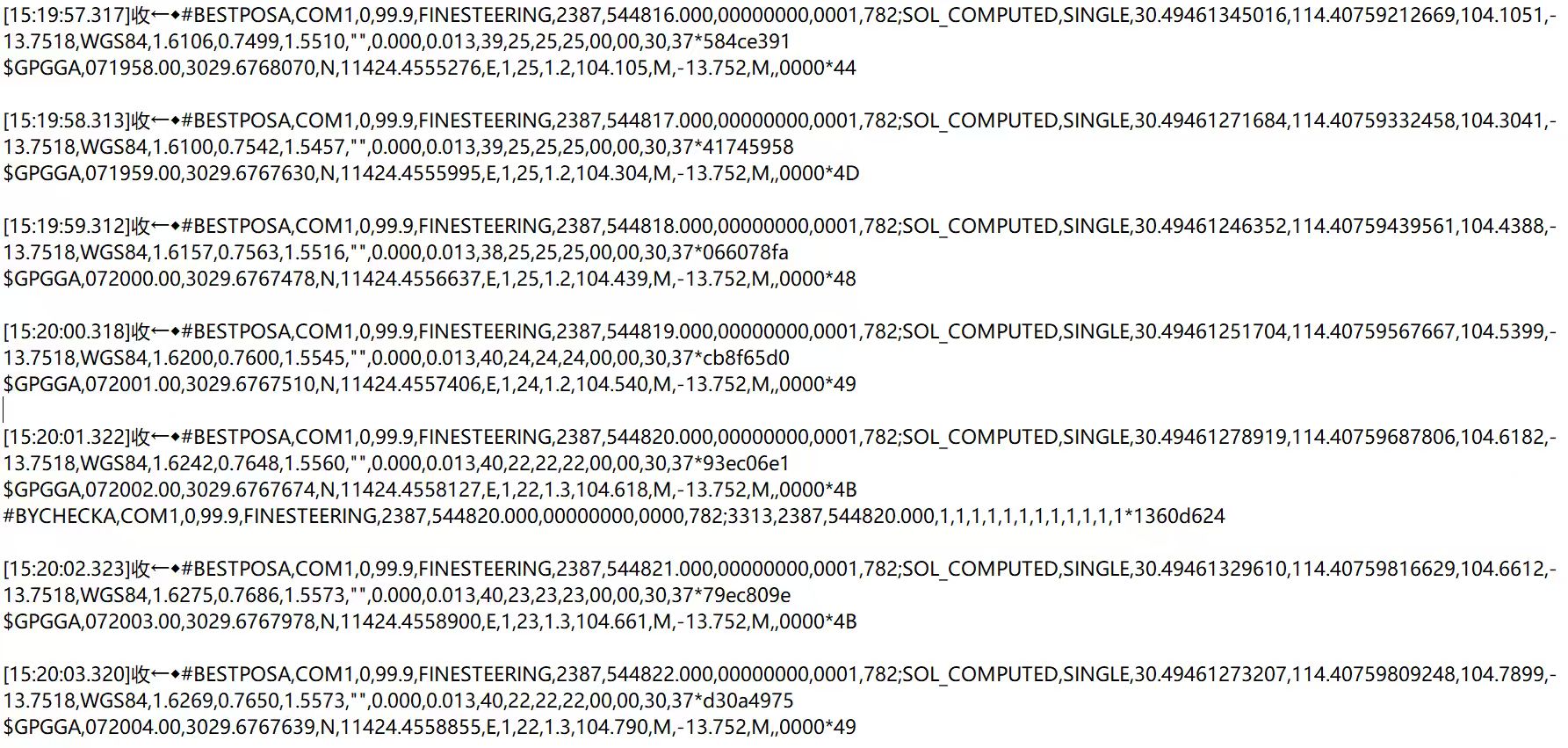
The data it outputs includes: positioning and orientation navigation messages, covering pose and velocity messages of GNSS and INS, timing information, azimuth, and the reference station ID (as the source of received differential data) for RTK; it also includes satellite status (such as the number of visible satellites, satellite identification numbers, elevation angles, azimuth angles, and Signal-to-Noise Ratio (SNR) values). For additional data requirements, please contact our technical staff in advance.
2.The original data format of attitude sensing is as follows:
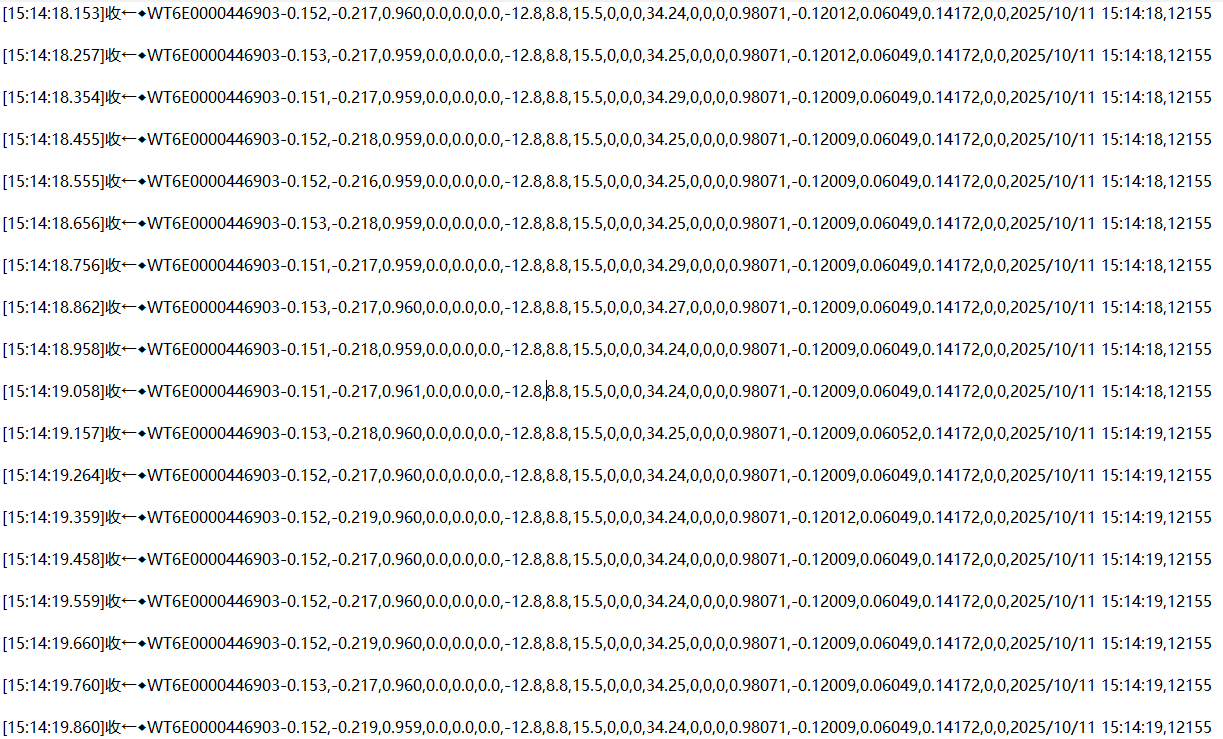
The data it outputs includes: acceleration (X, Y, Z), angular velocity (X, Y, Z), angle (X, Y, Z), temperature, and quaternions (Quaternion 0, Quaternion 1, Quaternion 2, Quaternion 3), etc.
3.The display in our company’s demo software is as follows:

Typical Applications

- Vehicle Intelligent Control and Management: Autonomous driving, remote control, dispatching and management of mobile vehicles, including mining trucks, heavy-duty trucks, cranes, freight trucks, cleaning vehicles, fire trucks, ambulances, official vehicles, buses, forklifts, warehouse cleaning machinery and other types of vehicles;
- Heavy Machinery Intelligent Control: Intelligent management of large lifting machinery (yard gantry cranes, quay cranes, overhead cranes, portal jib cranes, overhead traveling cranes, etc.), including anti-collision systems, unmanned operation or intelligent control digital twin systems;
- Unmanned Equipment Centralized Control: Centralized management and control systems for large robots and unmanned equipment (AGV/IGV/RGV, unmanned logistics vehicles, unmanned cleaning vehicles, unmanned intelligent agricultural machinery, unmanned taxis, etc.);
- Vessel Intelligent Management: Networking, dispatching and centralized management of vessels (especially unmanned vessels), including AIS (Automatic Identification System), anti-collision and load-limiting management;
- Low-Altitude Aircraft Intelligent Management: Status perception and networking of helicopters, airships, large unmanned aerial vehicles (UAVs), etc., to meet the needs of centralized management and dispatching operations for aircraft;
- Other Applications: Rental management of construction machinery such as tower cranes; dispatching management of trains and rail transit; operation safety management of special large-scale mechanical equipment, etc.






